
VCI 复习
临近第二次测试,但是发现什么都没学,决定女娲补天,记录讲义上的知识点。
Geometry#
Polygon mesh and Half-edge data structure#
Triangle mesh: Vertex table + Edge table + Triangle table
Half-edge structure:
struct HalfEdge {
HalfEdge *twin; // 共边面片对应的半边
HalfEdge *next; // 同一个面片的下一条边
Vertex *vertex; // 边的起点或者终点,自行钦定
Edge *edge; // 相关的边
Face *face; // 相关的面片
}Quad mesh:
易于差值和参数化
Subdivision surface#
Catmull-Clark#
-
计算新的面点和边点
-
更新顶点
-
形成新的 Quad mesh。
面点与原始面的边点相连,新的顶点与原始点的边的边点相连。
这里可以保证细分之后的 Polygon mesh 一定是 Quad mesh。
Loop#
-
计算边点,如果不是边界,那么
否则就直接用中点
-
更新顶点。 为 的邻居, 是邻居数量,当 时 其他时为 。
-
形成新的 Triangle mesh。
一个面的三个边点相连,原始边的边点与两个更新后的顶点相连。
Mesh Parameterization#
- 平均系数
- 均值坐标系数
- 调和坐标系数 ,近似于保角映射
Discrete differential geometry#
局部平均区域#
- 重心单元 (barycentric cell),即把三角形的两边的中点和三角形的重心顺次连起来.
- 泰森多边形单元 (Voronoi cell),是由每条边的中垂线确定的区域,根据中垂线的性质,每个三角形内,蓝色区域中的点到 x 的距离都会小于另两个顶点,若顶点周围存在钝角三角形,则蓝色区域会超出三角形.
- 混合泰森多边形单元 (mixed Voronoi cell) 是对上一种方法的改进,在出现钝角三角形时,用三条边的中点连线来框选出该三角形内的蓝色区域.
Normal Vector#
单个三角形的法向量是朴素的,关键是如何定义顶点的法向量。
三角坐标及对应的梯度#
拉普拉斯算子#
均匀拉普拉斯
余切拉普拉斯
梯度与拉普拉斯#
梯度:标量场 f 的变化方向
拉普拉斯:场 f 的细节
Mesh smoothing#
Diffusion equation
由于 在这里有离散形式,所以还可以写成矩阵的形式。
对时间和空间离散,并使用显式欧拉,那么有
余切算子能更好地保持几何特征,而均匀算子导致了三角网格切向的松弛
Mesh editing#
限制
求
Mesh simplification#
How much does it cost to collapse an edge?
Basic idea: compute edge midpoint, measure quadric error
Better idea: choose a point that minimizes quadric error
Quadric error: new vertex should minimize its sum of square distance (L2 distance) to previously related triangle planes!
Square distance to a single plane:
Quadric error: sum of square distances:
Reconstruction#
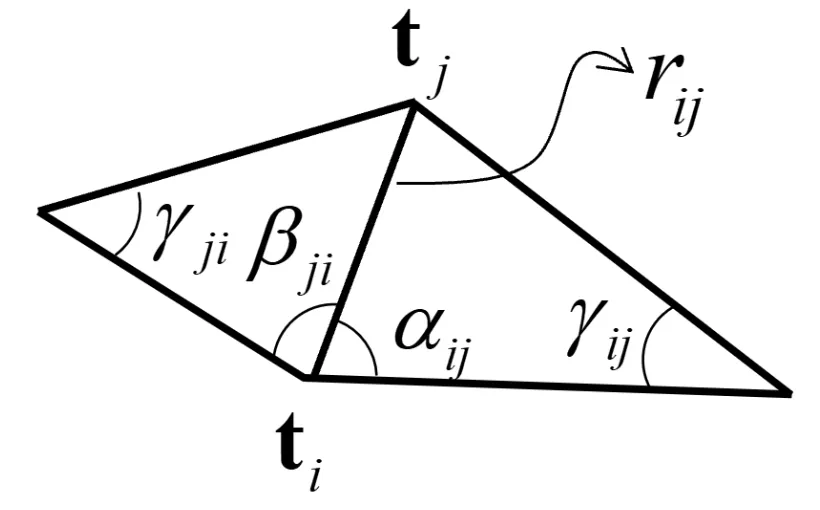
Registration#
Definition: transform one model to another based on their partially overlapping features
Alignment: find a correct transformation
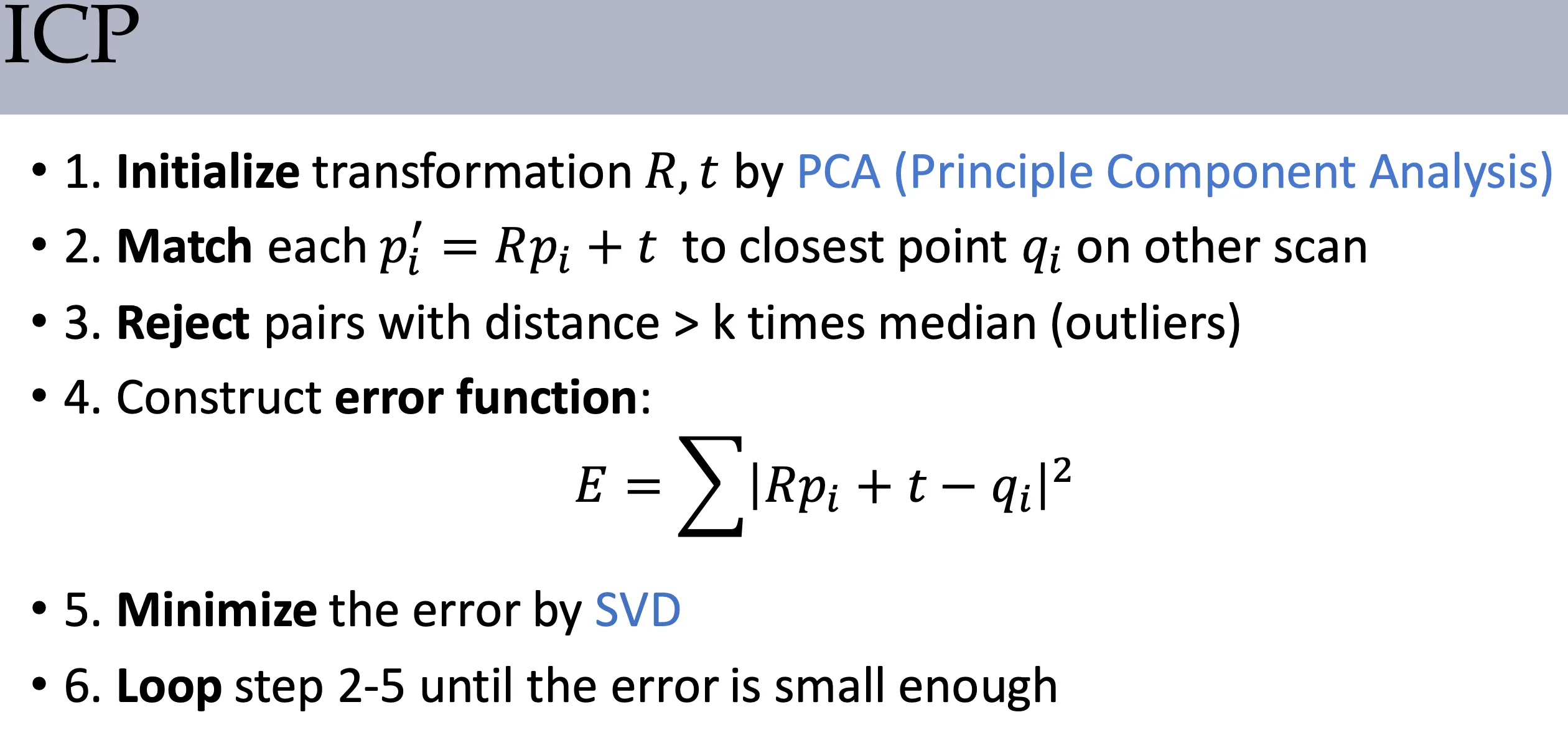
PCA:
- The eigenvectors form orthogonal axes (2 vectors in 2D; 3 vectors in 3D)
- Compute from one to another
Eigenvectors of represent principal directions of shape variation.
SVD to get eigenvectors of .
Surface Reconstruction Algorithm#
Directly: Triangulation
- Delaunay Triangulation
Indirectly: Implicit Surfaces + Marching Cubes
- Poisson Surface Reconstruction
Delaunay:
最大化所有三角形中最小的角
最后的结果是任何三角形的外接圆内,都不包含任何点。
增量式进行,每次向当前集合中添加一个点并连接一些边组成三角形,随后检查受到影响的周围的三角形是否满足德劳内性质,并对不满足性质的三角形进行翻转。
可以通过分治算法优化。
Poisson Surface Reconstruction: 计算 SDF 然后行进立方体
假设 是形状 对应的 SDF,我们通过计算 来表示 。
The input is oriented points (points with normals) sampled from a shape .
由于 所以
然后估计最小二乘解。(上面的 可以用矩阵形式描述)
算法通过八叉树 (Octree) 组织这些带法向量信息的点并在八叉树节点上定义一系列基函数,通过求解上述泊松方程得到基函数之间组合的系数,从而最终拟合出指示函数.
Marching Cubes:
分割若干个立方体,用 SDF 的到 256 中情况,根据不同的情况重建表面。
关于边上的点,要按照 SDF 的值来插值计算。
RANSAC#
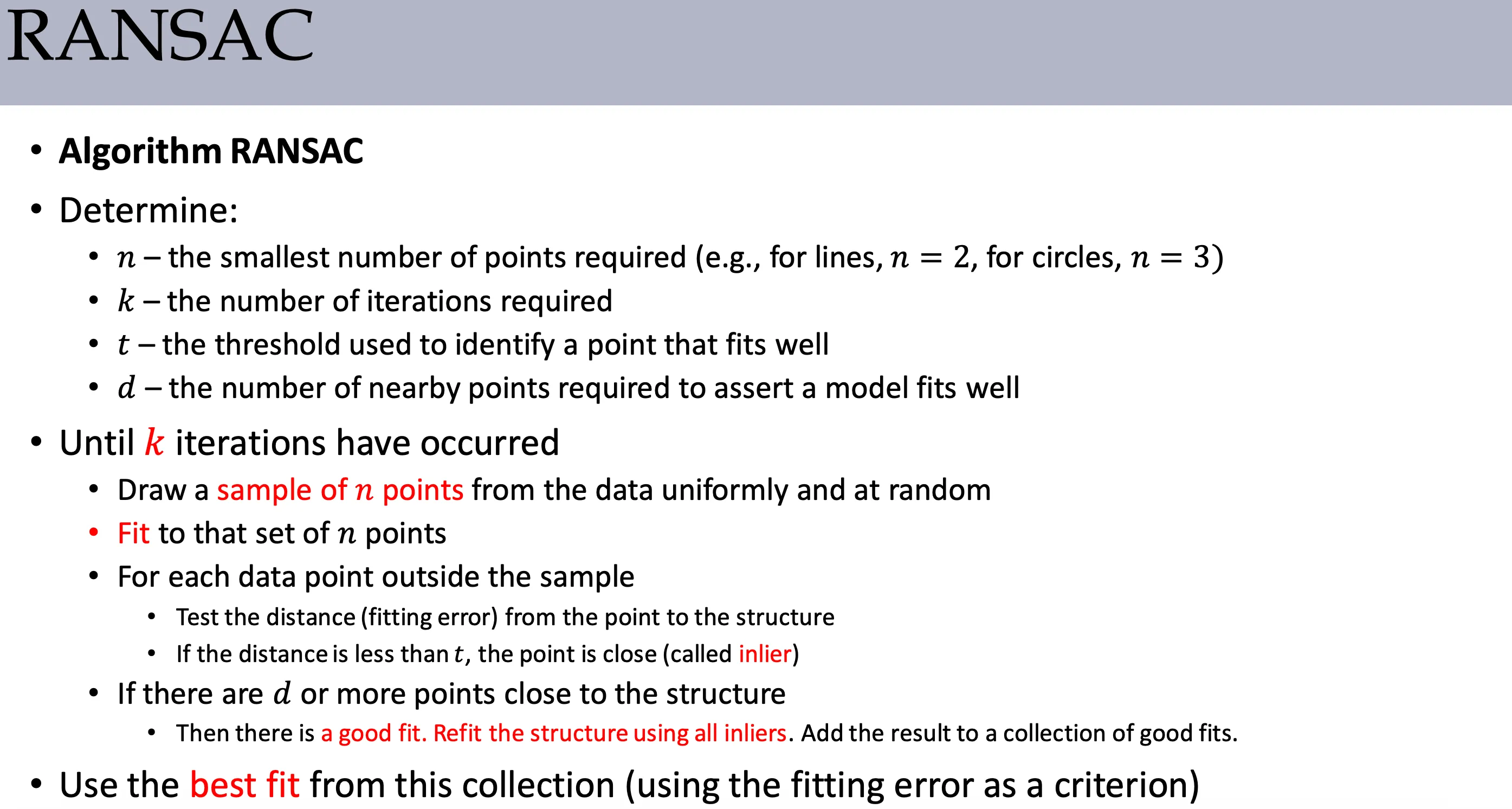
按照内点数量判断是否继续,最后用内点重新计算答案。
- 随机选择一个用于估算的最小子集(对于估计平面来说,该子集包含 3 个点)
- 用这个子集估算待求的参数
- 用估算的参数测试整个数据集,将误差在一定范围内的数据点作为“内点”(inliers)
- 如果内点的数量超过一定比例,就以全部内点为输入,使用最小二乘法重新估计一组更精确的待求参数
- 重复 1-4 步若干次,最后将“用最多内点估计出的参数”作为最终结果.
Transformation#
Axis-angle rotation in matrix representation#
The matrix for rotation by about axis (unit) :
欧拉角#
各种变换#
- Translation
- Rotation
- Shear
- Scale
- Coordinate transformation
- …
用齐次坐标,全部可以写成矩阵的形式,方便复合。
二维的旋转可以分解为两个类似于剪切的变换的复合。
铰接模型 Articulated Model#
某些部位自由度受限。
有依赖关系,前面改变了后面也要改变。
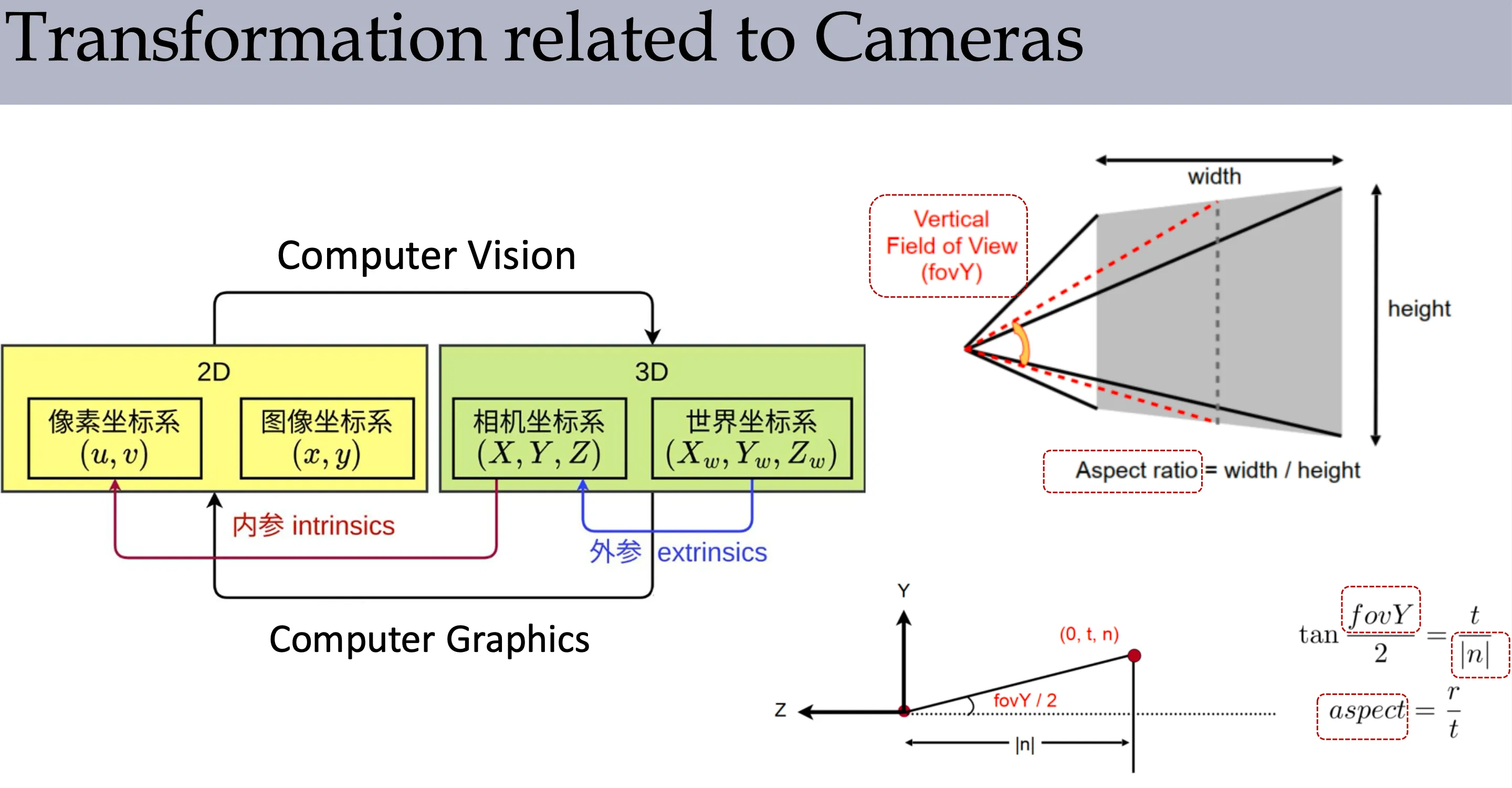
Viewing Projection#
near plane 就是成像平面
far plane 是考虑的最远的平面(渲染范围)
分为正交投影(Orthographic projection)和透视投影(Perspective projection),由于透视投影不是线性的,所以要使用齐次坐标来计算。
这里的坐标都是列向量,所以是 。
在求透视投影的矩阵时,如何计算 是不知道的,但是我们知道 ,然后用 来求解 即可。
注意,在计算了透视投影后,在接一个正交投影映射到长方体中,然后根据 z-buffer 确定如何显示。
在真实的相机中:
Randering#
Shadow Map#
从光源视角,渲染出一张纹理图,记录最近距离。
对于要计算的一个像素(对应点 ),计算 在光源视角的位置,并计算距离。并于纹理图比较,判断是否在阴影中。
Mipmap#
反走样的方法。
由于远处一个像素可能在纹理坐标上代表一个很大的范围,所以提前把原始的纹理图按照不同的比例压缩(多个像素的信息合并到一个像素上)。
这样根据表示范围的大小,在对应的压缩后的纹理图上提取信息,在相邻的两层之间插值。
由于可能不同方向的压缩比例不同(各向异性),所以不仅是同比例的压缩,还有不同比例压缩的组合。
法向贴图(Normal Mapping) or 凹凸贴图(BumpMapping)#
凹凸不平的表面并不影响碰撞等宏观性质,那么可以把凹凸不平的效果记录在纹理中,比如记录法向。
这样不改变表面的几何性质,但是又能正确的渲染颜色。
环境光贴图(Environment Mapping)#
考虑把周围的环境(远处的信息),用贴图表示,而不是一个几何物体,一种方法是 skybox,这样就可以快速计算环境的光照了。
注意这里要让环境的深度始终为 这样才是背景,在 skybox 中强行钦定 。
Ray Tracing#
一个像素只有一条 ray 会导致走样,使用 supersampling 的方法反走样。
Shadow Rays#
从要计算颜色的点 向光源方向发射一条射线,如果撞到物体说明被遮挡。
不用计算最近交点,只要撞到任意一个不透明物体就是遮挡的。返回布尔值或者透明度。
基础光追 Whitted-style 中光源是一个点,非黑即白(硬阴影)。
现代路径追踪 Path Tracing 或者分布式光线追踪中,光源有面积,在光源表面随机采样所个点,每个点都计算 Shadow ray,然后按照比例计算亮度。
Path Tracing#
Distribution ray tracing 的一种
a ray tracing method based on integral transport equation and rendering equation
Bidirectional Reflectance Distribution Function#
考虑自发光
Monte Carlo solver: 随机若干个 计算积分。碰到物体就递归(光追)